W środę, 8 listopada, biuro badawcze amerykańskiej marynarki wojennej ONR (Office of Naval Research) podpisało umowę o wartości 3 687 852 USD (12,14 mln zł) ze spółką SubUAS z Bridgewater na opracowanie i zademonstrowanie rozwiązania, dzięki któremu bezzałogowy okręt podwodny będzie zdolny do wystrzeliwania i odzyskiwania małego bezzałogowca Naviator, który może zarówno pływać pod wodą, jak i wykonywać lot w atmosferze. Całość operacji ma być wykonywania autonomicznie, bez udziału człowieka. Tak skompletowany system otrzyma nazwę SAND (Subsurface Autonomous Naviator Delivery).
 Naviator / Zdjęcie: Uniwersytet Rutgersa
Naviator / Zdjęcie: Uniwersytet Rutgersa
Naviator został opracowany na początku lat 2010. na Uniwersytecie Rutgersa w New Jersey pod kierownictwem prof. F. Javiera Dieza w ramach rządowego programu SBIR (Small Business Innovation Research), który zakłada współpracę wojska z małymi i średnimi przedsiębiorstwami z branż cywilnych. W 2016 powołano do życia spółkę SubUAS, która kontynuuje rozwój nowatorskiego projektu wielodomenowego bezzałogowca.
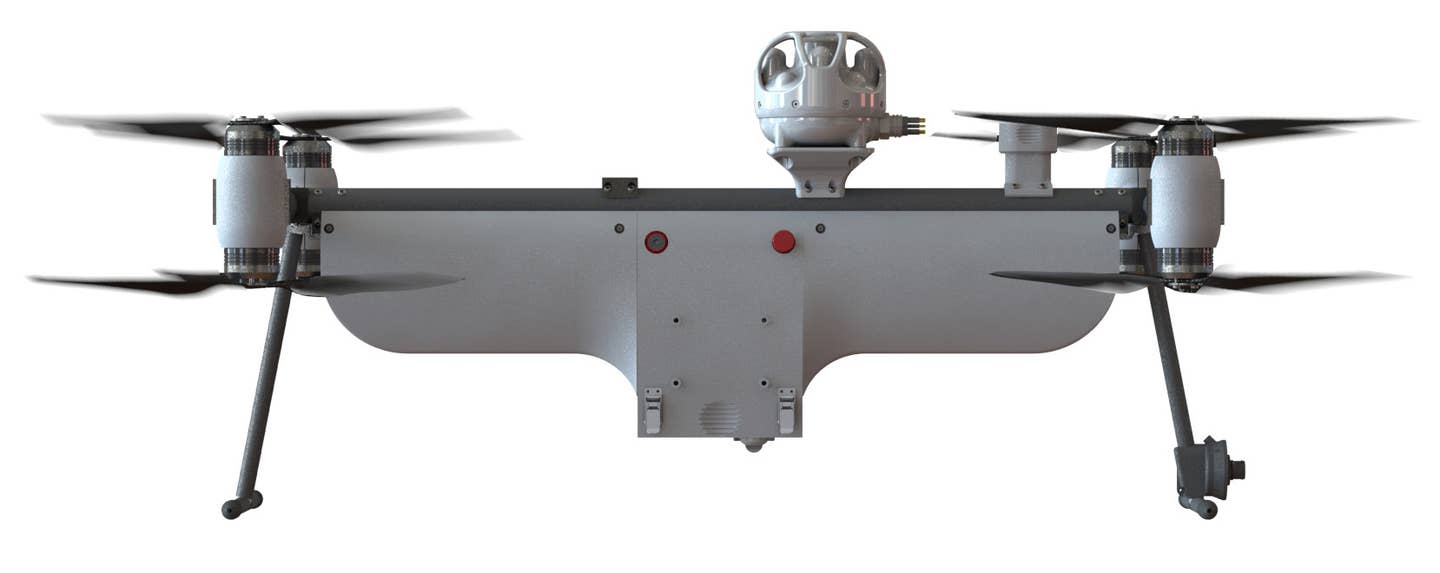
Naviator wygląda jak klasyczny ośmiowirnikowiec wyposażony w cztery ramiona, każde z dwoma śmigłami, przeznaczony do lotów atmosferycznych. Jednak w przeciwieństwie do nich, Naviator używa tego samego napędu do pływania pod wodą.
Jak podkreśla SubUAS, platforma jest w pełni skalowalna, ale w testowanej w poprzednich latach konfiguracji ma prawie 4,88 m rozpiętości ramion i ładowność przekraczającą 41 kg, co pozwala na przenoszenie kamer wideo, czujników optoelektronicznych i innych ładunków. W porównaniu z klasycznymi zdalnie sterowanymi robotami podwodne klasy ROV (Remotely Operated Vehicle), działającymi tylko w środowisku morskim, Naviator może skrócić czas dotarcia do rejonu działania wykonując lot w powietrzu.
Ponadto, Naviator ma mieć bardziej zaawansowane możliwości i funkcje niż bezzałogowce o podobnej wielkości i wykorzystuje precyzyjny system nawigacji satelitarnej GPS i system pozycjonowania oparty na czujniku wideo, a także tryb oszczędzania energii. Platforma może z łatwością wynurzyć się na powierzchnię akwenu morskiego, wysyłać dane, otrzymywać nowe instrukcje i wykonywać kolejne zadanie. Naviator zaprojektowano do w pełni autonomicznego działania bez ciągłego nadzoru człowieka, a jego zredukowany wariant może działać w tzw. roju. Naviator osiągnął prędkość podwodną 3,5 w., ale według producenta będzie możliwe osiągnięcie nawet 10 w., w zależności od konfiguracji. Nie wiadomo, jak jest maksymalna prędkość lotu.
 Naviator w innej proponowanej konfiguracji / Grafika: SubUAS
Naviator w innej proponowanej konfiguracji / Grafika: SubUAS
Biuro ONR nie precyzuje co ma być nosicielem Naviatora, gdyż nie jest od przedmiotem zamówienia. Kandydatem może być np. bezzałogowy okręt podwodny Orca, zbudowanych dla US Navy w ramach programu XLUUV (Extra Large Unmanned Underwater Vehicle). W lipcu br. spółka Boeing rozpoczęła próby morskie pierwszego z czterech zamówionych przez wojsko egzemplarzy (Bezzałogowa Orca XLUUV na testach morskich).
Podstawowe zadania okrętu Orca to rozpoznanie, unieszkodliwianie min morskich, ostrzeganie przed zagrożeniami podwodnymi i nawodnymi, szkolenie w zakresie zwalczania okrętów podwodnych, mapowanie dna morskiego dzięki sonarowi z syntetyczną aperturą SAR. Według założeń pojazdy będą też wahadłowo transportować ładunki. Jednak co ciekawiej, w kręgu zainteresowań US Navy jest możliwość przenoszenia lekkich torped i pocisków manewrujących (program Razorback), czy nawet powietrznych bezzałogowców (np. wielozadaniowe okręty podwodne z napędem nuklearnym typu Virginia mają przenosić bsl klasy mini Blackwing, produkcji AeroVironment). Uczyniłoby je to de facto nosicielami uzbrojenia.
Warto dodać, że 16 marca 2021 biuro ONR zleciło spółce Raytheon (część korporacji RTX) zbadanie możliwości integracji małych bezzałogowców Coyote Block 3 w konfiguracji tzw. amunicji krążącej z bezzałogowymi okrętami podwodnymi oraz bezzałogowymi pojazdami nawodnymi w programie demonstracyjnym LCCM (Low-Cost Cruise Missile).











Komentarze
Nikt jeszcze nie skomentował tego artykułu.